

Yang membuat proyek ini menarik bukan sekadar tampilan radarnya, melainkan cara kerjanya yang tetap ringkas di balik layar. Sebuah ESP32 mampu menggerakkan sensor ultrasonik HC-SR04 yang diputar motor stepper, lalu memetakan objek di sekelilingnya dalam tampilan radar 360 derajat langsung di PC.
Visualnya memang mengingatkan pada pemindai putar ala fiksi ilmiah. Namun, inti proyek ini justru berada pada susunan sistem yang sederhana, karena seluruh proses utama ditangani satu ESP32 tanpa rangkaian tambahan yang berlebihan.
Radar bergerak yang membaca sudut demi sudut
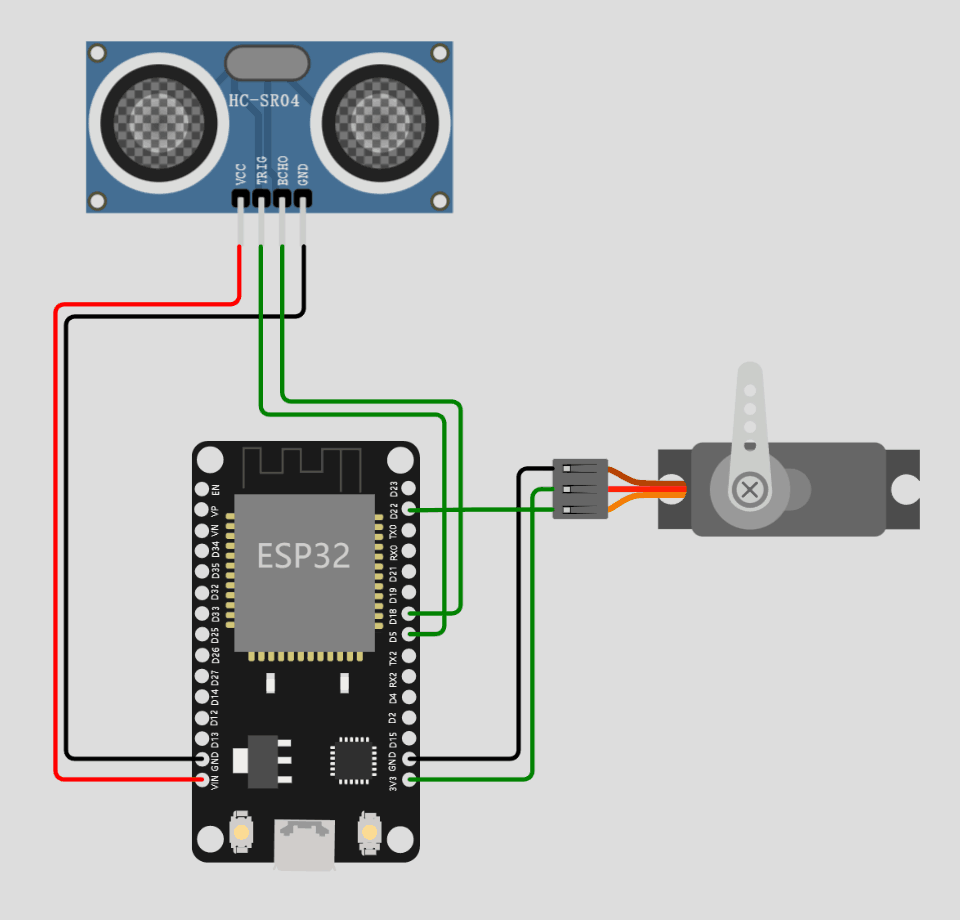
Cara kerja perangkat ini berpusat pada pemindaian area sekitar secara kontinu. Sensor ultrasonik diputar sampai 360 derajat, lalu ESP32 mengambil pembacaan jarak pada interval sudut tertentu untuk mengetahui posisi objek di sekelilingnya.
Setiap sensor berhenti atau melewati titik sudut yang sudah ditentukan, HC-SR04 akan mengirim data jarak. Informasi itu kemudian dipaketkan sebagai pasangan angle,distance sebelum dikirim ke komputer.
Data dari ESP32 langsung tampil di layar PC
Setelah data terkirim, antarmuka berbasis Processing di komputer akan menggambarkannya sebagai radar secara real time. Dengan begitu, pengguna tidak perlu membaca angka jarak satu per satu dari sensor karena hasilnya sudah muncul sebagai representasi visual.
Pengiriman data ini berlangsung lewat soket TCP. Alur sederhana tersebut membuat hasil pemindaian terlihat modern, meski komponen yang dipakai tetap familiar di kalangan perakit elektronik rumahan.
Satu papan untuk banyak tugas
Salah satu hal yang menonjol dari proyek ini adalah peran ESP32 yang sangat dominan. Papan ini bukan hanya mengatur putaran sensor, tetapi juga menangani komunikasi ke tampilan radar di PC.
Bagi penggemar mikrokontroler, pendekatan ini menarik karena memperlihatkan bahwa ESP32 bisa memegang beberapa fungsi sekaligus dalam satu sistem. Tugas mekanis, pembacaan sensor, dan pengiriman data berjalan tanpa perlu papan tambahan yang mengambil alih proses utama.
Komponen sederhana, hasil visual yang kuat
Dari sisi perangkat keras, kebutuhan proyek ini relatif ringan. Komponen utamanya hanya ESP32, motor stepper, sumber daya seperti baterai, dan platform putar untuk menopang sensor.
SciCraft, pembuat proyek ini, menekankan bahwa sistem tersebut bukan proyek sensor fusion yang rumit. Fokusnya adalah membangun pemindai minimal yang rapi, dengan satu tujuan utama: menyapu area sekitar dan menampilkan jarak objek berdasarkan sudut.
Kode yang disusun agar mudah dipelajari
Bagian lain yang ikut membuat proyek ini menonjol adalah dokumentasi kodenya. Source code disusun dengan format yang mudah dibaca, lalu dijelaskan bagian per bagian di GitHub agar lebih gampang dipahami.
Pendekatan seperti ini penting karena banyak proyek DIY terlihat menarik, tetapi sulit dipelajari ketika kode hanya dibagikan tanpa konteks. Dalam proyek ini, penjelasan kode justru menjadi bagian dari pengalaman belajar.
SciCraft juga mendorong pengguna untuk memahami logika program, bukan sekadar menyalin lalu menjalankannya. Hal itu relevan karena pemahaman dasar akan memudahkan penyesuaian jika sensor atau motor yang dipakai ingin diganti.
Mengapa proyek ini cepat menarik perhatian
Daya tarik utamanya datang dari gabungan visual yang kuat dan implementasi yang bersih. Radar 360 derajat yang terus bergerak memberi kesan canggih, sementara fondasinya tetap bertumpu pada komponen yang akrab bagi komunitas maker.
Proyek ini juga dibagikan melalui video YouTube lengkap dengan panduan perakitan serta kode di GitHub. Kombinasi seperti itu membuatnya bukan hanya enak dilihat, tetapi juga lebih mudah diikuti oleh mereka yang ingin mencoba membangun sistem serupa di rumah.
Source: www.xda-developers.com