

Rover Mars generasi baru sedang diarahkan untuk bergerak di pasir dengan cara yang tidak biasa: bukan sekadar meluncur di atas permukaan, melainkan seolah-olah berenang di dalamnya. Pendekatan ini muncul dari upaya VaMEx, proyek Valles Marineris Explorer milik German Space Agency di German Aerospace Center, yang ingin membangun kawanan robot otonom heterogen untuk menjelajahi wilayah Valles Marineris di Mars.
Fokusnya jelas, karena area itu menyimpan tantangan sekaligus nilai ilmiah yang besar. Valles Marineris adalah sistem lembah retakan raksasa di Mars yang sering disebut sebagai Grand Canyon di Planet Merah, dan para ilmuwan menaruh perhatian pada ceruk-ceruk terlindung di sana yang mungkin masih menyimpan jejak air cair serta habitat bagi kemungkinan kehidupan.
Masalahnya, medan di lokasi itu tidak ramah bagi kendaraan robotik. Pasir, kerikil, lereng, dan permukaan yang tidak rata menuntut rover tetap stabil dan efisien meski harus bergerak di topografi yang rumit.
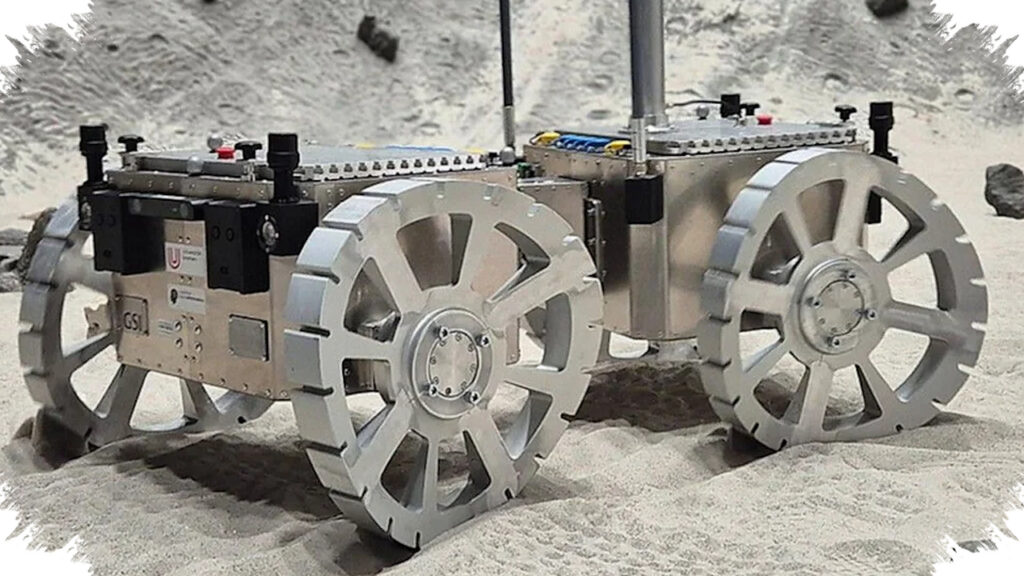
Roda melengkung yang meniru hewan gurun
Salah satu gagasan paling menarik dari VaMEx adalah penggunaan roda melengkung yang terinspirasi dari kadal gurun. Roda ini dirancang agar mampu “berenang” melalui pasir, meniru gerakan kaki hewan gurun yang lincah di material lepas.
Tim dari University of Würzburg mengambil inspirasi dari sandfish, lalu menerjemahkannya ke sistem mobilitas rover Mars. Bersama peneliti DLR di Bremen, Jerman, tim tersebut merancang roda yang meniru karakteristik gerak sandfish dan cara berinteraksi dengan tanah, sehingga kendaraan dapat menghasilkan gaya longitudinal dan lateral sekaligus.
Jejak yang ditinggalkan rover menjadi tanda paling mudah dikenali dari cara kerja itu. Alih-alih bergerak membentuk garis lurus, rover menghasilkan trek sinusoidal atau berbentuk S saat melaju di pasir.
Uji mobilitas di pasir dan medan terbuka
Riset mobilitas bio-inspirasi ini dipimpin oleh Marco Schmidt, ilmuwan komputer di universitas sekaligus kepala Chair of Embedded Systems and Sensors for Earth Observation. Timnya menguji rover di pasir dan di medan terbuka bersama German Research Center for Artificial Intelligence di Bremen serta University of Bremen.
Hasil awal menunjukkan kendaraan dapat bergerak stabil di atas pasir. Meski begitu, Schmidt menilai eksperimen tersebut juga memperlihatkan bahwa desain ini masih perlu disempurnakan agar benar-benar siap menghadapi kondisi yang lebih beragam.
Inspirasi biologisnya datang dari Scincus scincus, kadal yang hidup di gurun Sahara. Hewan ini mampu menggali lalu secara harfiah “berenang” di pasir gurun untuk berburu atau menghindari predator.
Target berikutnya: lebih adaptif di medan campuran
Pengembangan teknik mobilitas ini masih berlanjut di universitas. Langkah berikutnya ditujukan untuk meningkatkan performa di medan campuran, yang biasanya jauh lebih rumit daripada permukaan pasir tunggal.
Tim ESSEO juga ingin memperluas kontribusinya pada VaMEx ke arah mobilitas berbasis perangkat lunak. Rencana riset berikutnya mencakup strategi kendali yang secara eksplisit memperhitungkan selip, tenggelamnya roda, dan interaksi antara medan dengan roda.
Arah pengembangan itu ditujukan agar perilaku rover menjadi lebih stabil dan adaptif di lingkungan granular. Jika berhasil, pendekatan tersebut dapat membantu kendaraan robotik menyeberangi hamparan bukit pasir Mars secara lebih andal dan efisien.
Pascal Lee dari SETI Institute, Mars Institute, Ceres Robotics, dan NASA Ames Research Center, yang tidak terlibat dalam studi ini, menilai solusi mobilitas seperti ini sangat penting untuk eksplorasi Mars masa depan. Menurutnya, kemampuan menjelajah dune field yang luas di Mars, bukan hanya di Valles Marineris tetapi di seluruh planet, akan menjadi kunci bagi misi robotik maupun berawak.