

Kawanan robot kecil dari Harvard menunjukkan bahwa pekerjaan kompleks tidak selalu memerlukan pengendali tunggal. Dengan aturan lokal yang sederhana, mereka bisa menata material menjadi struktur baru, lalu mengubah perilaku yang sama untuk membongkar struktur ketika setelan sistem diganti.
Robot itu dinamai RAnts dan dikembangkan oleh tim dari Harvard John A. Paulson School of Engineering and Applied Sciences serta Faculty of Arts and Sciences. Penelitian ini dipimpin L. Mahadevan dan dipublikasikan di PRX Life, dengan fokus pada cara perilaku kolektif muncul dari interaksi sederhana antara agen dan lingkungan.
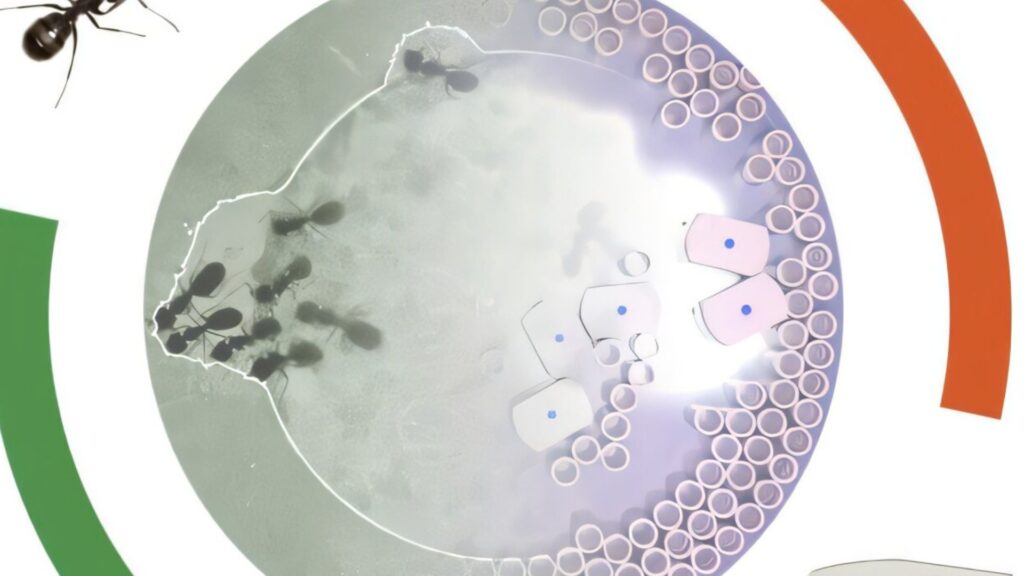
Yang membuat sistem ini menarik adalah cara komunikasinya. Alih-alih memakai feromon seperti semut, robot menggunakan medan cahaya yang disebut photormones, lalu sebuah webcam melacak tiap unit dan memperbarui proyeksi cahaya di arena secara real time.
Setiap RAnt memiliki dua sensor cahaya untuk membaca intensitas dan arah sinyal. Robot ini juga dibekali dua roda yang bisa dikendalikan secara independen, serta magnet yang dapat ditarik untuk mengambil dan melepaskan blok bangunan silinder dengan cincin magnet.
Perilaku kawanan tidak lahir dari instruksi rumit, melainkan dari rangkaian aturan singkat. Robot bergerak mengikuti gradien sinyal, membawa material saat petunjuk cocok, lalu menjatuhkan atau menghapus material ketika ambang tertentu tercapai.
Dari mekanisme sederhana itu muncul dinamika yang lebih kaya. Pada titik tertentu, robot mulai berkumpul membentuk nucleation sites, yakni lokasi awal yang menjadi benih struktur, dan tim menjelaskan pola ini lewat trapping instability.
Fenomena tersebut berarti robot bisa terjebak sementara oleh sinyal yang mereka hasilkan sendiri. Saat beberapa unit sudah menumpuk di satu lokasi, robot lain ikut tertarik ke titik yang sama sehingga proses kolektif makin kuat.
Perilaku satu robot ternyata penting untuk memahami perilaku kelompok. Dalam medan sinyal statis dengan gradien konstan, satu robot cenderung bergerak melingkar, sedangkan dalam medan dinamis pola itu bisa berubah menjadi self-trapping jika kondisinya sesuai.
Trapping dipengaruhi oleh geometri sensor, lebar produksi sinyal, dan parameter gain atau sensitivitas. Dengan menyesuaikan faktor-faktor itu, peneliti membuat satu robot tidak mudah terjebak, tetapi banyak robot bersama-sama dapat menciptakan jebakan stabil yang berfungsi sebagai benih aksi kolektif.
Dari menyebar ke mengelompok
Saat cooperation lemah, robot cenderung menjelajah lebih luas dan menaruh material secara tersebar. Ketika tingkat kerja sama diperkuat, lintasan mereka melengkung ke arah lokasi yang sama dan kawanan mulai membentuk struktur yang lebih terpusat.
Pada pengaturan kerja sama paling kuat, hasil akhirnya bukan banyak klaster kecil, melainkan satu klaster besar yang kira-kira isotropik. Pola ini menunjukkan bahwa perubahan kecil pada aturan lokal dapat mengubah keluaran skala besar secara nyata.
Bisa membangun, lalu membongkar
Salah satu kemampuan paling menonjol dari sistem ini adalah peralihan dari membangun ke membongkar. Dua parameter yang paling berpengaruh adalah cooperation strength, yang menentukan seberapa kuat robot mengikuti gradien sinyal, dan deposition rate, yang mengatur apakah material ditaruh atau dihapus.
Dengan mengubah setelan itu, tim berhasil memindahkan perilaku kolektif dari membentuk struktur baru menjadi merobohkan struktur yang sudah ada. Dalam percobaan, robot dapat mengumpulkan material menjadi agregat teratur atau menggali bersama melalui substrat padat.
Para peneliti juga menggabungkan eksperimen itu dengan model kontinum yang melacak tiga medan sekaligus, yaitu kepadatan robot, sinyal komunikasi, dan kepadatan substrat. Kerangka ini memperluas teori agregasi biologis lama karena lingkungan tidak lagi dianggap sebagai latar diam, melainkan sesuatu yang ikut dibentuk ulang oleh para agen.
Mereka menyebut gagasan tersebut sebagai exbodied intelligence. Dalam kerangka ini, kecerdasan kolektif lahir dari hubungan berkelanjutan antara individu dan lingkungan yang menyimpan jejak tindakan sebelumnya.
Pendekatan semacam ini dinilai relevan untuk lokasi berbahaya, seperti zona bencana, area konstruksi terpencil, dan eksplorasi planet. Tim tetap mencatat batasannya, termasuk belum dibedakannya berbagai struktur fungsional dan belum dimasukkannya efek kepadatan lokal tinggi seperti bottleneck saat menghindari rintangan.
Langkah berikutnya yang dianggap wajar adalah memberi sistem kemampuan memilih hasil berdasarkan fitness relatif, misalnya saat bentuk tertentu lebih cocok untuk tugas tertentu. Untuk sementara, penelitian ini sudah memperlihatkan bahwa kawanan robot dapat bekerja tanpa master plan untuk menyelesaikan pekerjaan yang kompleks.